







;)
;)





 이미지 확대보기
이미지 확대보기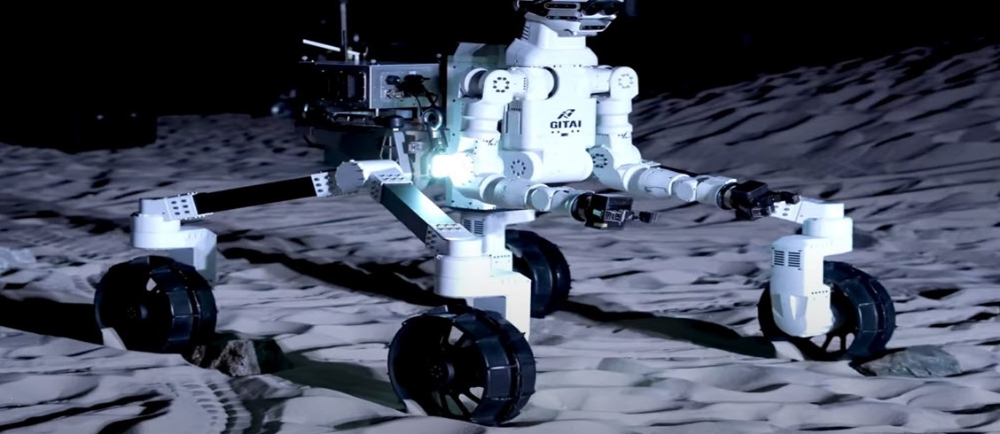
‘켄타우로스’라는 말은 고대 그리스 신화에 나오는 반인반수의 괴물이다. 이 로봇은 바퀴가 달린 4개의 다리가 있어 아무리 가파른 지형에서도 로봇을 움직이도록 설계된 것이 특징이다. 두 개의 로봇 팔이 있는 몸통이 있고 두 개의 로봇 팔이 있는 목이 있다. 2개의 위치 카메라도 있다.
전체 디자인은 고전 신화에 나오는 말의 몸과 인간의 몸통을 가진 ‘켄타우로스’의 아이디어와 결합된 인간형 외관을 가지고 있다.
이 로봇은 달 바닥을 매우 천천히 돌면서 암석 샘플을 채취하여 미국 항공우주국(NASA), JAXA, 유럽 기관, 중국, 러시아에서 향후 몇 년 동안 계획하고 있는 달 기지들 중 하나로 샘플을 운반하기 위해 고안된 차량이다. 속도는 느리다.
또 태양광 패널이나 안테나 등 태양광 부품을 화물 컨테이너에서 꺼내 목적지로 운반하고, 조립할 수도 있다. 자원 채취용 도구를 컨테이너에서 꺼내 달 표면에 있는 모래를 채취하고, 정해진 위치에 운반도 가능하다. 또 경사 15~20도의 모래 언덕을 넘을 수 있다.
‘켄타우로스’ 로봇 설계에 대해 JAXA와 협력한 일본 회사인 기타이는 국제 우주 정거장에 고정되고 패널, 연결 케이블 등을 작동 및 조립할 수 있는 로봇 팔을 포함하는 키보 모듈의 실물 크기 모형도 제작했다.
달 탐사 프로그램인 아르테미스는 2024년에 우주비행사를 다시 달 표면에 배치하는 것을 목표로 하고 있으며, 현재 그들은 2024년에 첫 유인 임무와 올해 오리온 로켓과 13개의 위성을 우주로 발사하는 것을 목표로 한다.
박정한 글로벌이코노믹 기자 park@g-enews.com






















