







;)
;)





 이미지 확대보기
이미지 확대보기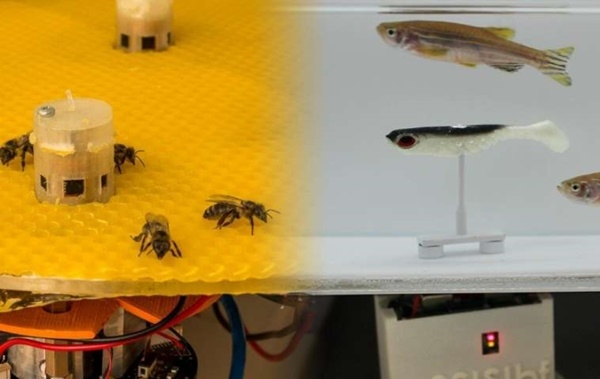
더사이언티스트는 21일 벌과 물고기가 서로 '대화'할 수 있게 해 주는 급진적인 로봇 번역기(워키토키시스템)가 처음 개발됐다며 이를 소개했다.
이에 따르면 과학자들은 오스트리아 그라츠에 있는 어린 꿀벌과 상호작용하는 로봇이 스위스 로잔에 있는 스위스연방공대(EPFL)의 상호작용 방식 물고기 로봇들과 정보를 교환하면서 다른 종 간 의사소통을 할 수 있다는 것을 확인했다.
물고기와 꿀벌은 번역자 역할을 하는 로봇의 도움을 받아 ‘대화’를 한다. 벌 로봇과 물고기 로봇들의 상호작용이 각 동물그룹의 행동에 영향을 미친 것이다. 이 시스템은 동물의 생체신호를 읽고 그에 따라 해석하는 원리로 개발됐다.
 이미지 확대보기
이미지 확대보기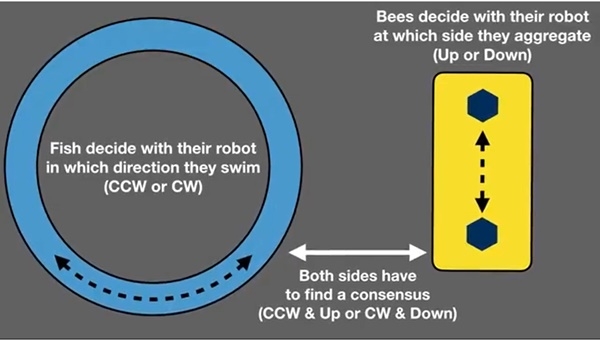
파리 디드로 대학 물리학자인 호세 할로이는 새로운 실험을 위해 스위스연방공대(EPFL), 오스트리아 그라츠 대학교 등과 협력해 인터넷 통신 기술로 다른 두 종(벌-물고기) 간 상호작용을 할 수 있도록 만들었다. 그는 자연상태에서는 상호작용하지 않는 두 개의 다른 종인 꿀벌과 제브라 피쉬를 가지고 실험했는데 이들은 1000km이상 떨어진 곳에 있었다. 공동연구자이자 사이언스로보틱스지 논문 공저자 프랑크 보넷은 “우리가 한 일은 극단적인 것”이라고 말한다.
연구진은 30분간 이뤄진 실험에서 이들 동물에 집단적 선택을 하도록 제시했다.
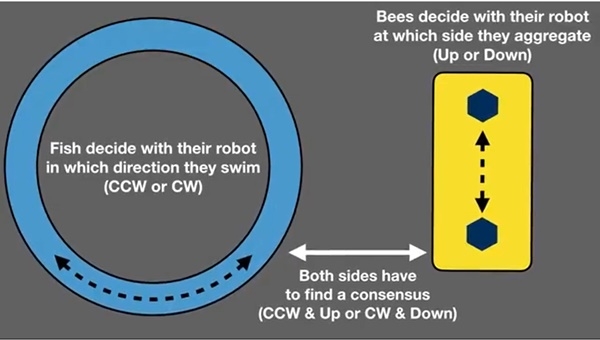
꿀벌의 경우 선택지는 두 개의 열 방출 로봇 중 어느 쪽에 모일지를 결정하는 것이었고, 제브라 피쉬의 경우 로봇물고기와 함께 있는 도넛 모양의 탱크에서 어느 방향으로 헤엄치는가를 결정하는 것이었다.
연구팀은 제브라 피쉬 그룹과 난 지 하루된 꿀벌에 합류시킨 로봇을 통해 이 두 종(species)이 서로의 행동에 영향을 미치도록 할 수 있다는 것을 확인했다.
 이미지 확대보기
이미지 확대보기
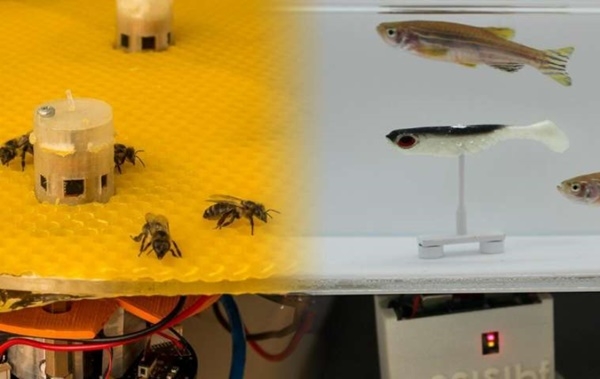
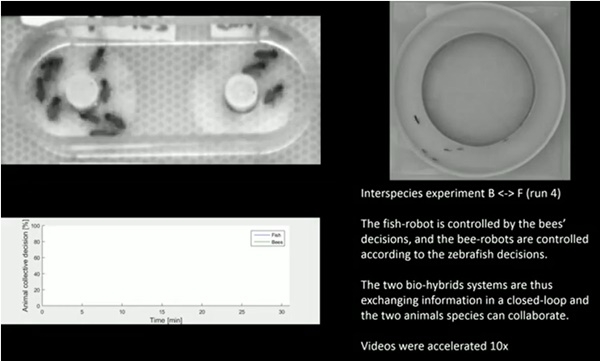
이들은 벌떼 속에 작은 단말기(로봇) 2개를 심었고 1000km 떨어진 곳에 있는 물고기 떼 사이에 로봇 물고기 한 마리를 넣었다. 이후 물리적으로 분리된 두 생물 군체에서 나오는 신호들은 두 다른 종들이 이해할 수 있는 언어로 번역됐다.
벌의 서식지 안에 있는 단말기(로봇)는 변화하는 공기 온도, 움직임, 진동을 이용해 서로 의사소통을 했고, 물고기 집단에 보내진 물고기 로봇 '스파이'는 자신의 색깔, 속도, 움직임을 바꾸었다. 그 결과, 물고기들이 자신들의 헤엄 패턴을 시계 반대 방향으로 바꾸는 동안 벌들은 단말기 바깥으로 몰려들기 시작했다.
실험에서 꿀벌 서식지의 로봇과 물고기 로봇이 실제로 꿀벌 및 제브라 피쉬와 상호 작용하는 것을 확인할 수 있었다. 꿀벌 로봇에는 적외선 센서가 있어 인근 꿀벌의 밀도를 추정 할 수 있었으며 꿀벌이 많을수록 로봇이 더 많은 열을 방출해 더 많은 꿀벌들을 모여들도록 했다.
물고기 로봇은 수족관을 촬영하는 카메라로 물고기들과 자신의 위치를 감지하고 대다수를 따라다님으로써 실제 물고기의 방향 변화에 반응했는데 이는 반대로 어느 방향으로 수영할지에 대한 제브라 피쉬들의 집단적 결정에 영향을 미쳤다.
이어 연구진은 인터넷 통신으로 두 로봇을 연결했다. 꿀벌이 한 로봇이나 다른 로봇을 향해 선회할 때의 정보는 물고기로봇으로 전달됐고 로봇은 시계 방향, 또는 시계 반대 방향으로 더많은 물고기들이 헤엄치도록 한 것으로 해석됐다. 반대로, 물고기의 헤엄치는 방향 정보는 물고기 로봇에서 꿀벌 로봇으로 전송돼 이 신호로 더많은 벌꿀들이 특정 로봇을 선택토록 했다.
공동 연구자 보넷은 “두 가지 설정을 연결하면 로봇은 번역자처럼 행동한다”고 말한다.
제브라 피쉬는 일반적으로 집단으로 헤엄치지만 한 방향으로 수영하지 않는다. 그들은 자주 방향을 바꾼다. 그러나 물고기 로봇이 꿀벌 로봇으로부터 정보를 받았을 때 물고기들은 몇 분 또는 그 이상 걸려 합의에 도달했다. 어린 꿀벌들은 자신들의 영역 속에 있는 로봇이 물고기 로봇의 정보를 받지 못했을 때, 두 로봇 중 하나와 약 15분이 지나면 합의하게 되기 때문이다.
반대로, 물고기의 우유부단한 헤엄 패턴은 꿀벌의 행동에 영향을 미쳤다. 물고기 로봇이 꿀벌 거주지와 정보를 공유하면, 꿀벌들은 결정을 위해 30분 동안 두 로봇사이를 왔다 갔다 했다. 의사 소통이 양방향이라면 꿀벌은 서식지에 있는 두 로봇 중 한 곳에 정착하기까지 약 5분이 걸렸다.
바이오로브의 프란체스코 몬다 교수는 “로봇들은 마치 국제 회의에서 협상가나 통역자처럼 행동했다”고 말했다. 그는 “다양한 정보 교환을 통해 동물의 두 그룹이 점차 공통된 결정을 내리게 됐다”고 말했다.
과학자들은 통상적이지 않은 종 간 통신 전망이 실제과학에 비해 흥밋거리에 불과해 보일지라도 이 기능이 실제 생물학적 연구에 응용된다고 말한다.
뉴저지 공대의 복잡계 생물학자인 사이먼 가르니에는 과학자들에게 “이같은 기술을 사용해 두 종류의 종이 서로 통신할 수 있도록 한 것은 이번이 처음"이라고 말했다. 그는 이어 이는 로봇이 멀리 떨어져있는 사람들 사이의 상호 작용을 중재토록 할 수 있다는 개념증명이라고 말했다.
과학자들은 이 연구의 이점을 두가지로 요약하고 있다.
이 발견은 로봇 공학자들이 특정 동물 그룹의 생물 신호를 포착하는 방법을 이해하고 적용하는 데 도움이 될 수 있다.
이 연구를 보다 미래지향적으로 생각해 보면 이러한 유형의 로봇 기술 발전은 생물학자들이 동물의 삶을 보다 좋게 형성하는 데 도움을 줄 인공지능(AI) 로봇 개발을 도울 수 있다.
또한 이 데이터는 특정 동물이 상호 작용하는 방식과 그 이유에 대한 이해를 돕는다. 특히 이 기술은 동물들을 오염된 지역이나 다른 유해한 결과로부터 멀리하도록 도울 수 있다.
할로이는 10년 이상 동물과 지능적으로 상호 작용할 수 있도록 로봇 개발을 위해 노력해 왔다. 그는 “간단하고 인상적인 것은 로봇이 통신이나 인터넷을 사용할 수 있으며 동물은 그렇게 할 수 없다는 것”이라고 말했다. 그는 “우리는 다음 단계로 이 그룹에 동물들이 할 수 없는 기능을 추가하려 하고 있다”고 말했다.
이들은 이 기술이 동물의 행동을 더 좋게 하는데 도움이 될 수 있다고 말한다.
이재구 기자 jklee@g-enews.com






















